Join
Building generative models for motion synthesis or control Experimenting with humanoids, robot arms, exoskeletons and dexterous hands Training virtual agents using RL and transfer to real robots Collecting data with different motion capture systems Pre-training or fine-tuning VLMs for policy dev

Before you start
- Basic Python familiarity
- Comfort with algebra or calculus basics
- Interest in robotics systems
About this guide
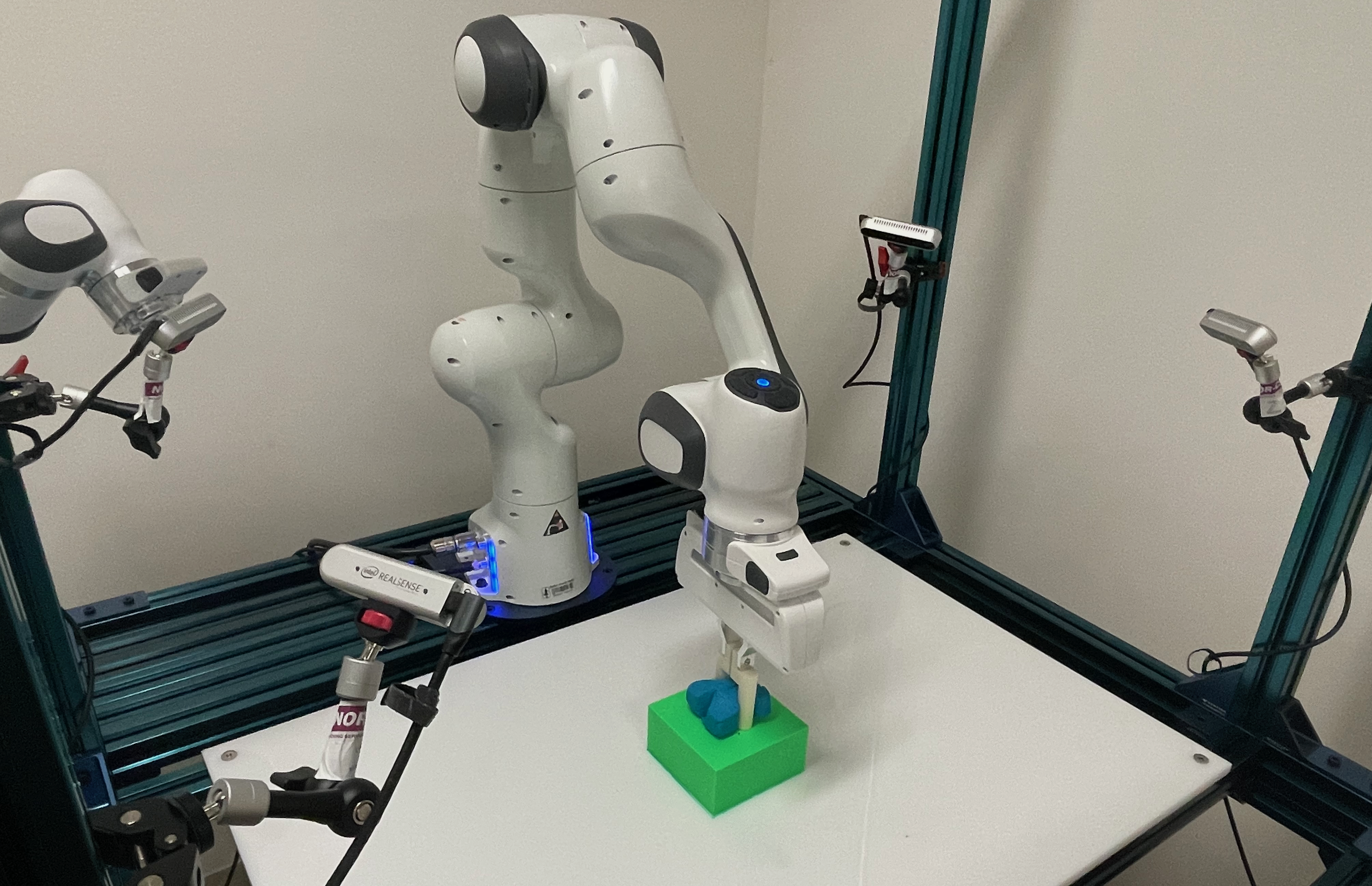
Building generative models for motion synthesis or control Experimenting with humanoids, robot arms, exoskeletons and dexterous hands Training virtual agents using RL and transfer to real robots Collecting data with different motion capture systems Pre-training or fine-tuning VLMs for policy development Developing and using multibody simulators Designing and building 3D-printable humanoids Solving both convex and non-convex optimization problems [...] #### Humanoid Robotic Foundation Mode
Common questions
What will I learn in Join?
Building generative models for motion synthesis or control Experimenting with humanoids, robot arms, exoskeletons and dexterous hands Training virtual agents using RL and transfer to real robots Collecting data with different motion capture systems Pre-training or fine-tuning VLM
Is Join free?
HumanoidHub has not verified public pricing for this guide. Open Stanford Online for the current access terms before enrolling.
Do I need any prerequisites?
Recommended prep: Basic Python familiarity; Comfort with algebra or calculus basics; Interest in robotics systems.
How long does it take?
1 hours total. Most learners complete this guide in self-directed sessions over a few weeks.
Does it offer a certificate?
This guide does not include a formal certificate. Focus is on the learning material itself.
Related guides

Stanford HAI Conference Explores Robotics in a Human-Centered World: Hype, Hope, and Future Directions | Stanford HAI
Scholars zeroed in on the need for data, generalization, and better human experience.
Training a Robot to Shape Letters from Play-Doh | Stanford HAI
Stanford’s RoboCraft learns to mold deformable objects from visual cues, a capability that could lead to more useful home assistants.
[PDF] Robots for the Human and Interactive Simulations - Stanford University
This framework was integrated with our haptic render-ing system to provide a general environment for interac-tive haptic dynamic simulation. Figure 2 shows a user hap-tically interacting with a simulated humanoid robot. The haptic device serves as a 3D position input and force output device. By movi
A new model offers robots precise pick-and-place solutions
SimPLE (Simulation to Pick Localize and placE), a new model developed by MIT researchers, learns to pick, regrasp and place objects using object’s computer-aided design (CAD) model
Helping robots practice skills independently to adapt to unfamiliar environments
A robot rapidly specializes its skills using parameter policy learning, where the machine can rapidly specialize at specific, smaller actions within a long-horizon task. The MIT CSAIL algorithm enables autonomous practice to improve at mobile-manipulation activities.

Lecture 8.4: Stefanie Tellex - Human-Robot Collaboration | MIT Learn
<p><strong>Description: Human collaboration with robots that perform actions in real-world environments, carry out complex sequences of actions and actively coordinate with people, establishing a social-feedback loop. <p><strong>Instructor: Stefanie Tellex
Robots that use these skills
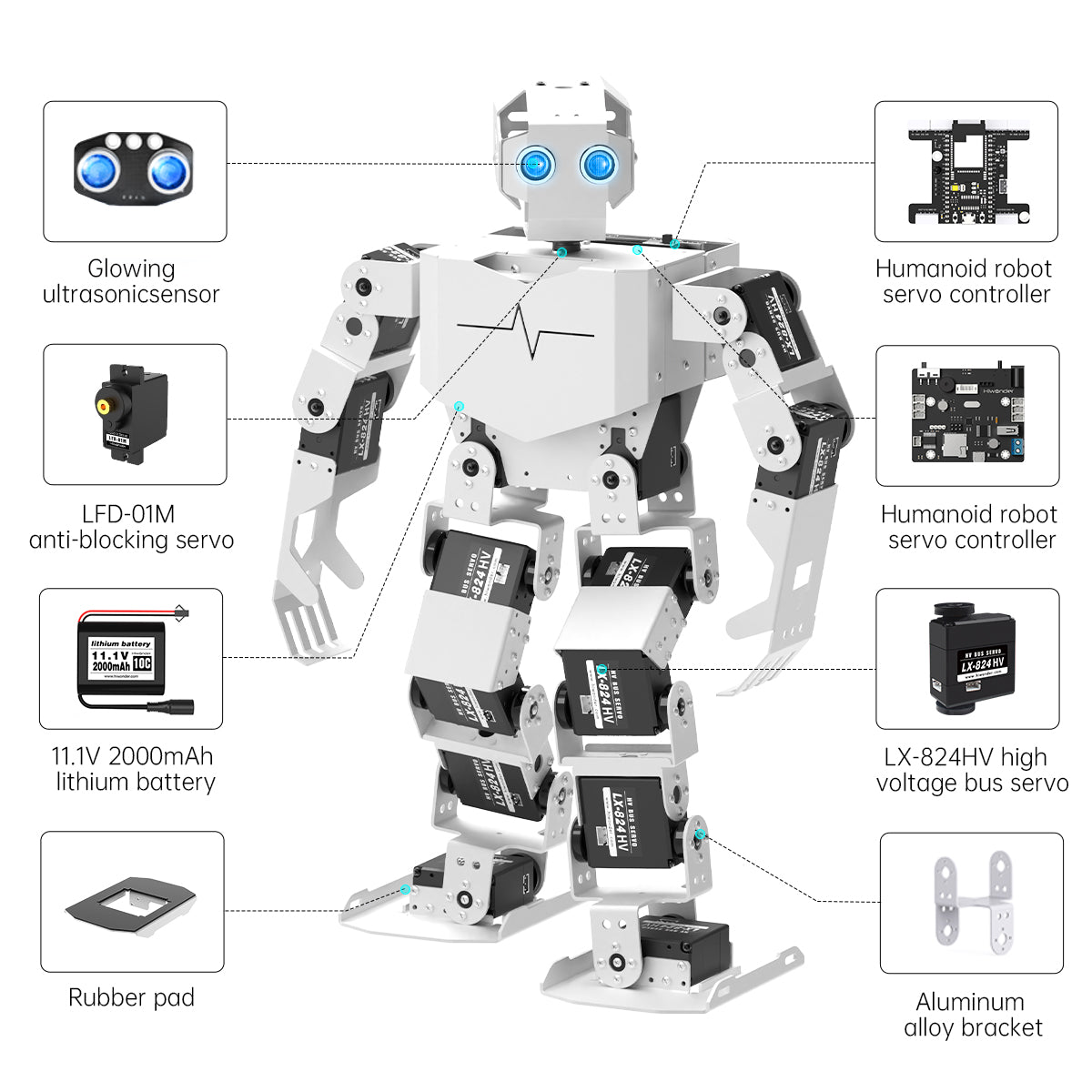
HiWonder TonyBot Humanoid Robot Kit
Hiwonder
Hiwonder TonyBot is a small humanoid (biped) robot kit for STEM learning with 16 DOF servo joints and app/program control.

1X EVE
1X Technologies
1X EVE is a wheeled humanoid robot from 1X Technologies aimed at mobile service work in institutional and industrial settings.

AgiBot G2
AgiBot
AgiBot G2 is an industrial humanoid robot platform built for versatile factory and logistics tasks, with onboard AI for long-sequence task execution.
Refer a learner and get early access to our paid pathways and 1:1 mentorship pilot.
Join referral list