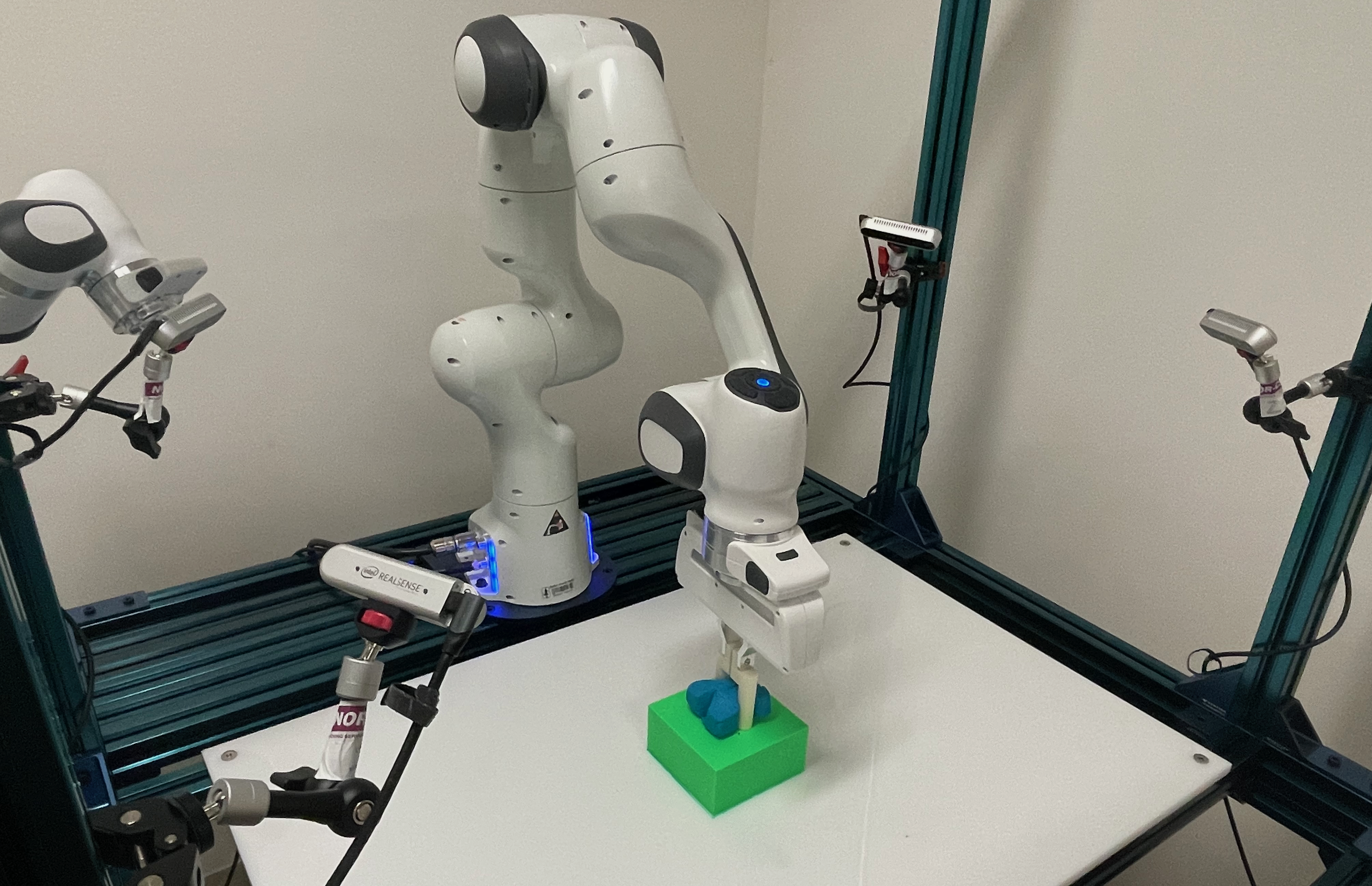
iGibson: Interactive Simulation of Large Scale Virtualized Realistic Scenes for Robot Learning
@InProceedings{pmlr-v164-li22b, title = {iGibson 2.0: Object-Centric Simulation for Robot Learning of Everyday Household Tasks}, author = {Li, Chengshu and Xia, Fei and Mart\'in-Mart\'in, Roberto and Lingelbach, Michael and Srivastava, Sanjana and Shen, Bokui and Vainio, Kent Elliott and Gokmen, Cem

Before you start
- Basic Python familiarity
- Comfort with algebra or calculus basics
- Interest in robotics systems
About this guide
@InProceedings{pmlr-v164-li22b, title = {iGibson 2.0: Object-Centric Simulation for Robot Learning of Everyday Household Tasks}, author = {Li, Chengshu and Xia, Fei and Mart'in-Mart'in, Roberto and Lingelbach, Michael and Srivastava, Sanjana and Shen, Bokui and Vainio, Kent Elliott and Gokmen, Cem and Dharan, Gokul and Jain, Tanish and Kurenkov, Andrey and Liu, Karen and Gweon, Hyowon and Wu, Jiajun and Fei-Fei, Li and Savarese, Silvio}, booktitle = {Proceedings of the 5th Conference on Robot
Common questions
What will I learn in iGibson: Interactive Simulation of Large Scale Virtualized Realistic Scenes for Robot Learning?
@InProceedings{pmlr-v164-li22b, title = {iGibson 2.0: Object-Centric Simulation for Robot Learning of Everyday Household Tasks}, author = {Li, Chengshu and Xia, Fei and Mart\'in-Mart\'in, Roberto and Lingelbach, Michael and Srivastava, Sanjana and Shen, Bokui and Vainio, Kent Ell
Is iGibson: Interactive Simulation of Large Scale Virtualized Realistic Scenes for Robot Learning free?
HumanoidHub has not verified public pricing for this guide. Open Stanford Online for the current access terms before enrolling.
Do I need any prerequisites?
Recommended prep: Basic Python familiarity; Comfort with algebra or calculus basics; Interest in robotics systems.
How long does it take?
Self-paced (provider defined). Most learners complete this guide in self-directed sessions over a few weeks.
Does it offer a certificate?
This guide does not include a formal certificate. Focus is on the learning material itself.
Related guides
A new model offers robots precise pick-and-place solutions
SimPLE (Simulation to Pick Localize and placE), a new model developed by MIT researchers, learns to pick, regrasp and place objects using object’s computer-aided design (CAD) model
Drake: Model-Based Design and Verification for Robotics
# Model-Based Design and Verification for Robotics A C++ / Python toolbox supported by the Toyota Research Institute. Install Learn More ## Core Library #### Modeling Dynamical Systems APITUTORIAL #### Solving Mathematical Programs APITUTORIAL #### Multibody Kinematics and Dynamics APITUTOR

Home | Stanford HAI
Advancing AI research, education, and policy to improve the human condition.

Stanford HAI Conference Explores Robotics in a Human-Centered World: Hype, Hope, and Future Directions | Stanford HAI
Scholars zeroed in on the need for data, generalization, and better human experience.

Topics in Advanced Robotic Manipulation | Course
This course is especially concerned with new approaches for overcoming challenges in generalization from experience, exploration of the environment, and learning representation so that these methods can scale to real problems. Students are expected to present one paper in a tutorial, debate a paper
Training a Robot to Shape Letters from Play-Doh | Stanford HAI
Stanford’s RoboCraft learns to mold deformable objects from visual cues, a capability that could lead to more useful home assistants.
Robots that use these skills
Robo-C 2
Qihan Technology
Robo-C 2 is a human-shaped service robot by Qihan Technology designed for interactive front-desk and exhibition scenarios.

ARI
PAL Robotics
ARI is a human-size wheeled service robot from PAL Robotics for human–robot interaction in public spaces and labs.
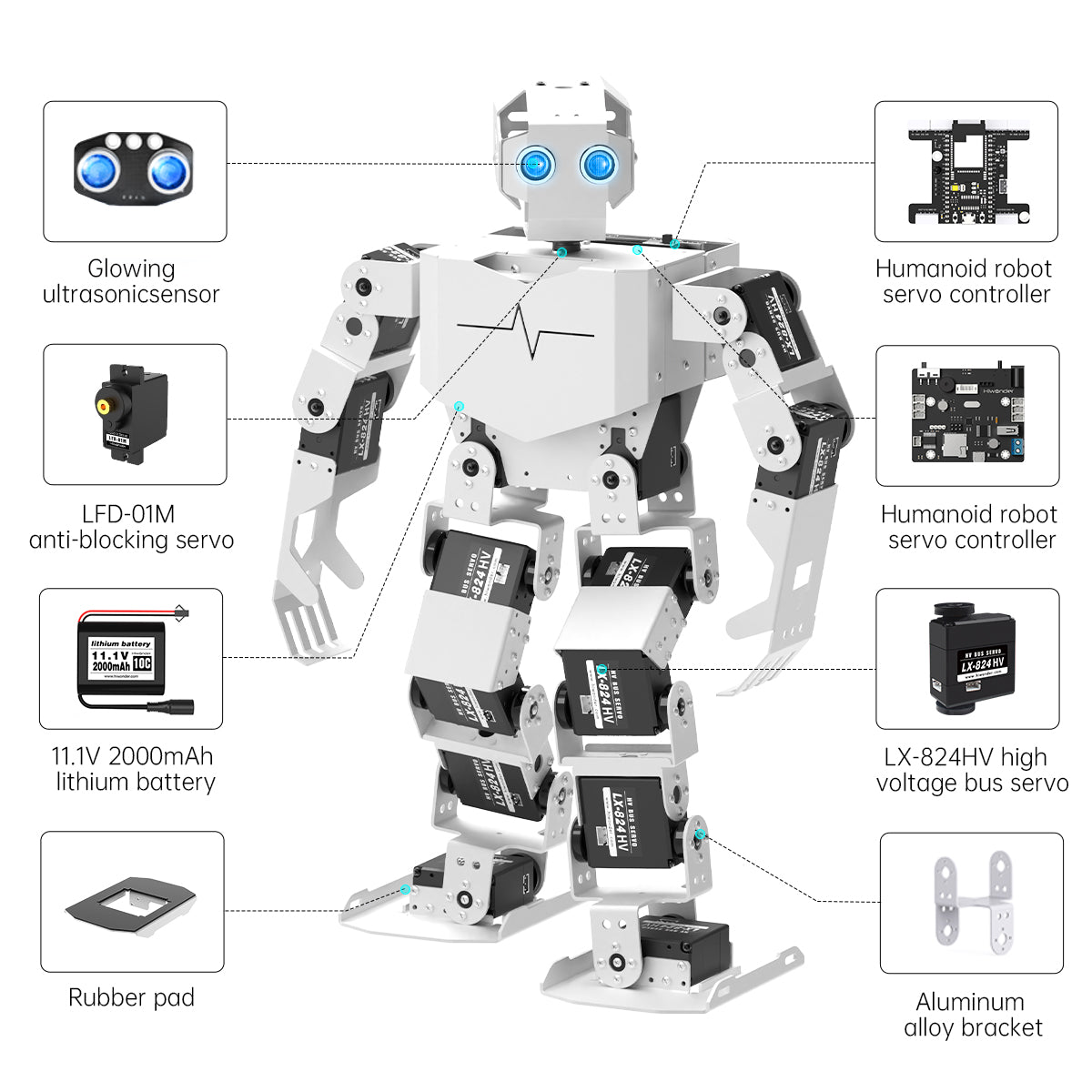
HiWonder TonyBot Humanoid Robot Kit
Hiwonder
Hiwonder TonyBot is a small humanoid (biped) robot kit for STEM learning with 16 DOF servo joints and app/program control.
Refer a learner and get early access to our paid pathways and 1:1 mentorship pilot.
Join referral list